First Documented Build Log For the Into the Deep Season
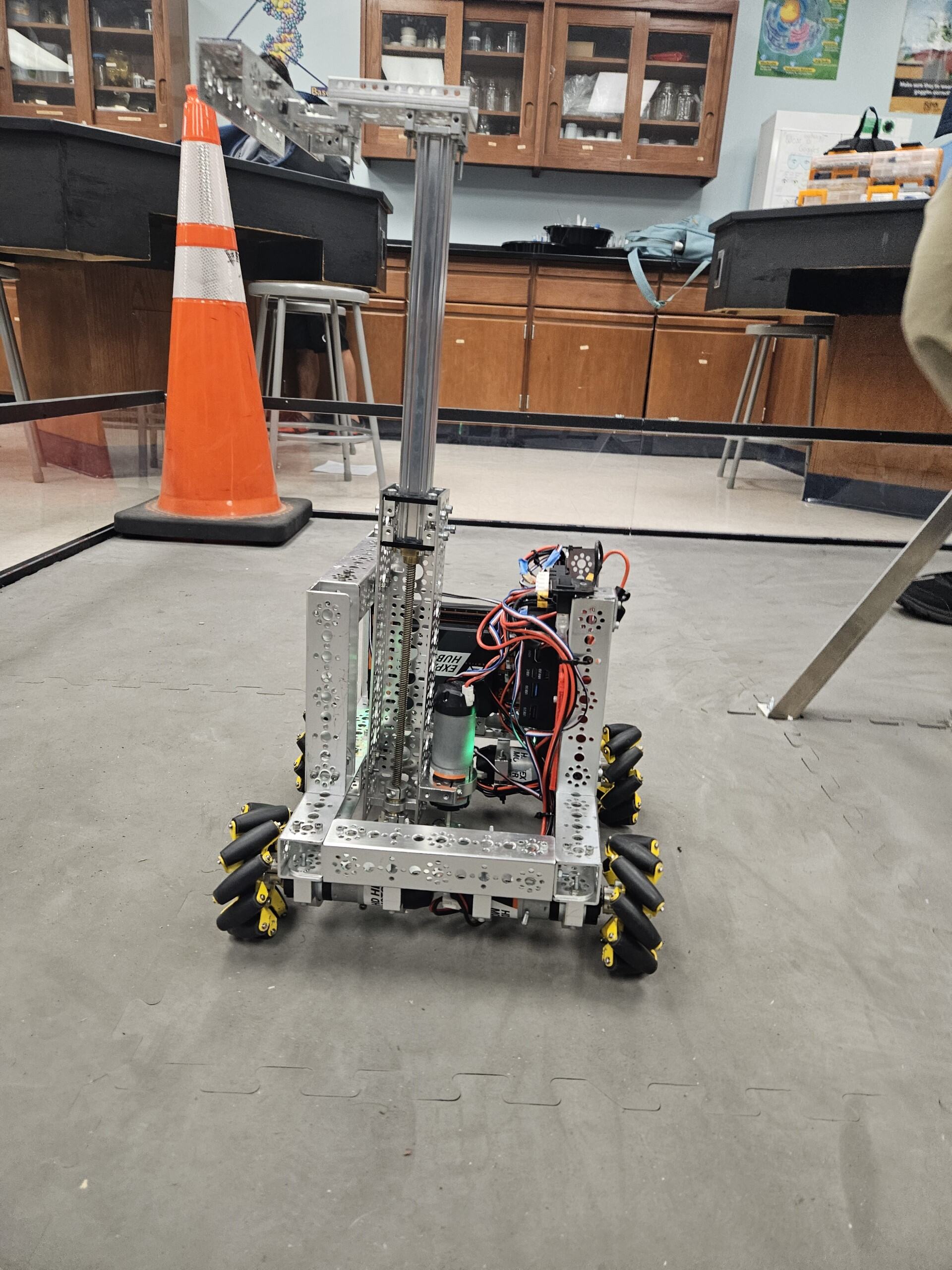
This is the first actually log for our team's season. I'm a bit late to this because i've been busy coding the rest of the website. So at the momment we have a mostly functional robot. In the robots curent state it can drive around and strafe. The robot is also capable of almost hanging itself on the low bar of the truss. We have attached a linear slider to the robot aswell to hopefully allow us to score once we have a working claw. This week we did quite a bit. We revised our method for attaching the linear actuator. The old design allowed the actuator to move around too much. We made a new truss type structure to support the actuator. This works however the slider still does not go in far enough and one wheel still barely touches the floor. Ignoring that rather large issue we decided to work on attaching our main linear slider to allow us to actually score. Some lost brain cells later the linear slider is on the robot. I quickly coded the arm to work with just the joystick on gamepad2. I will later code the robot to allow us to move the arm to a specific position using the encoders built into the motors. I later attached the motor that has the spool of string for the linear slider. We also later realized that to pass inspection we'll have to remove a segment from our linear slider. That was the end of the week and we'll have to pick up next week.